Левитрон своими руками: самодельная схема устройства для левитации в магнитном поле
Идея устройства очень проста, электромагнит поднимает в воздух магнит, а для создания эффекта левитации в магнитном поле, он подключен к высокочастотному источнику, который то поднимает, то опускает объект.

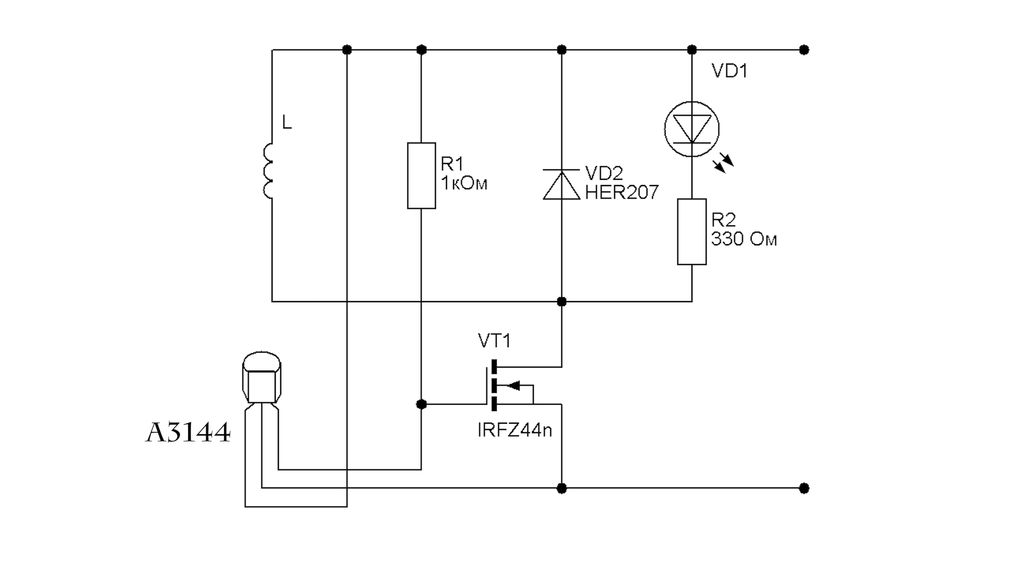
Шаг 1: Схема устройства
Шаг 2: Сборка
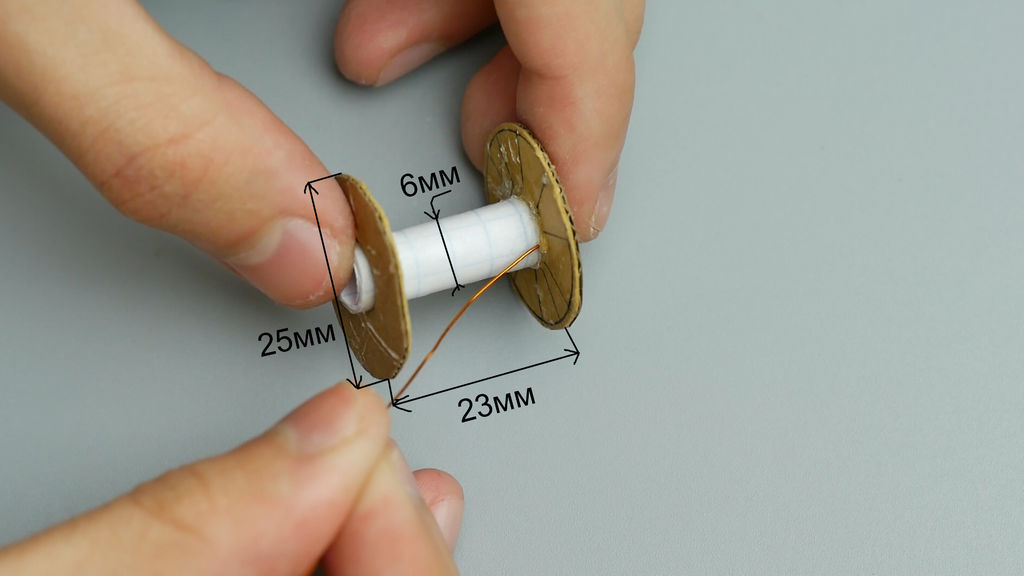
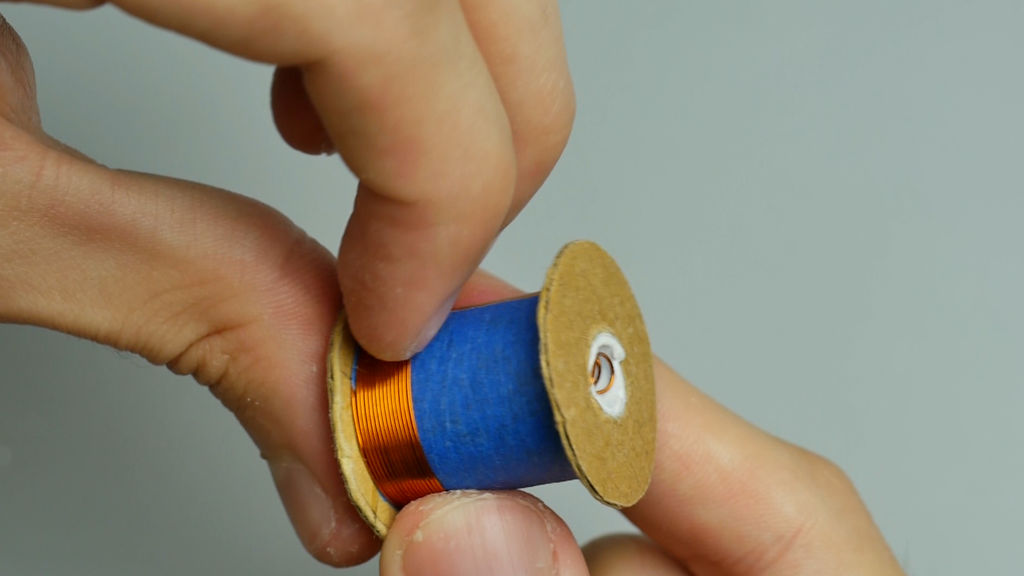
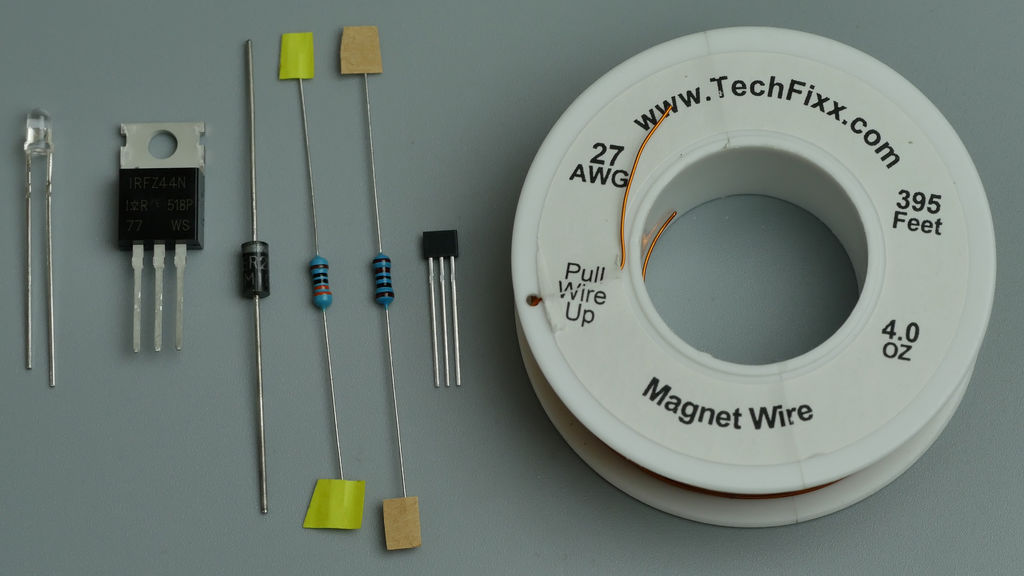
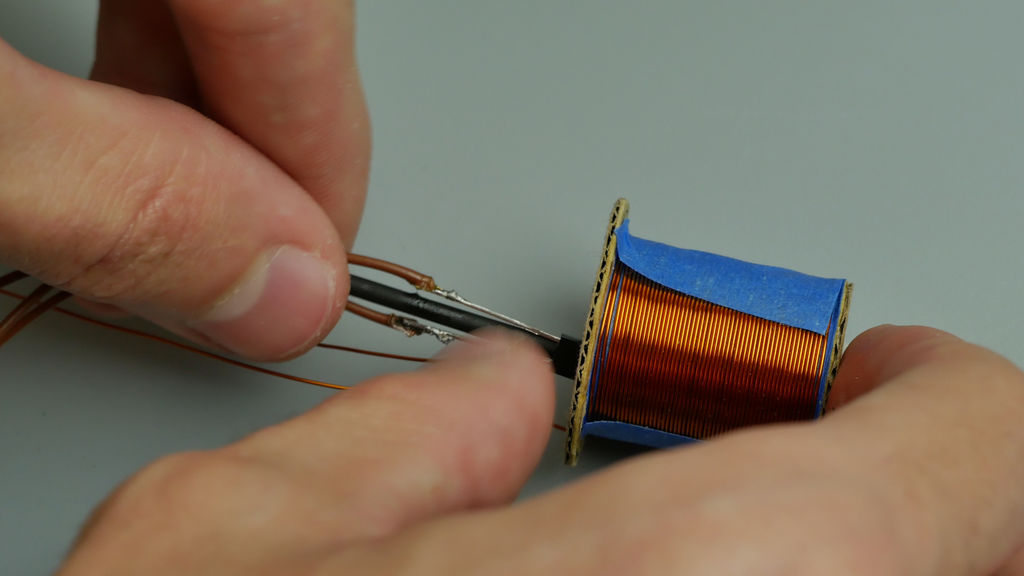
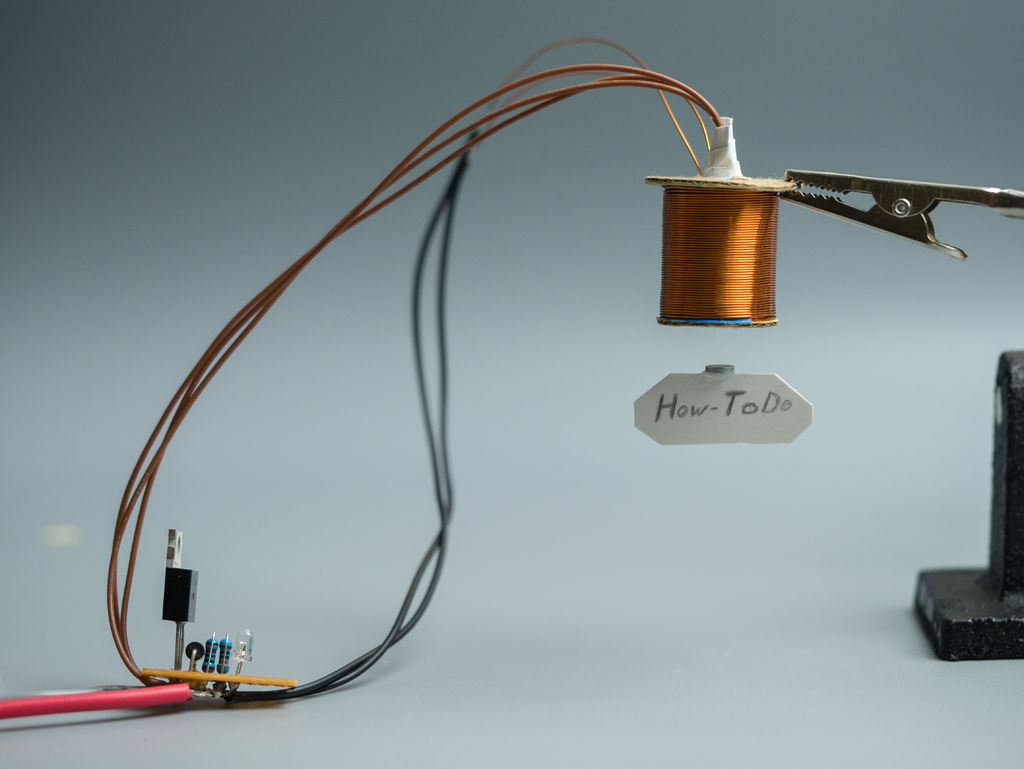
Приступим к сборке. Сперва нам нужно сделать рамку для электромагнита примерно таких размеров: диаметр 6 мм, высота мотка примерно 23 мм, и диаметр ушек около 25 мм. Как видите, изготовить её можно из обычного листа, картона и суперклея. теперь закрепим начало мотка на рамке и расслабимся — нам нужно будет сделать около 550 оборотов, неважно в каком набавлении. Я сделал 12 слоёв, что отняло у меня 1.5 часа.
Шаг 3: Спайка
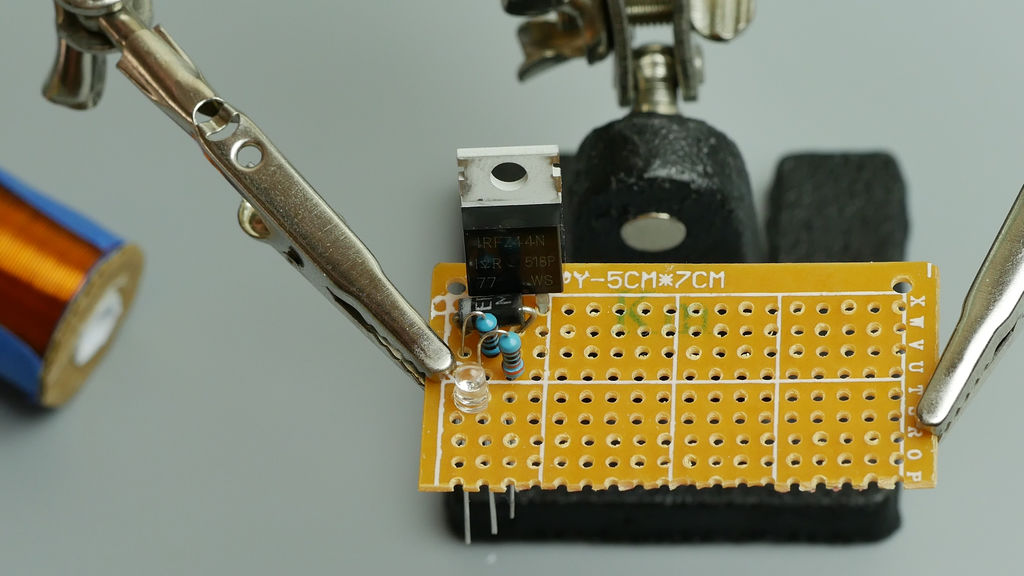

Спаиваем всё по схеме, без каких-либо нюансов. Датчик Холла припаян к проводам, т.к. он будет помещён в катушку. Когда всё спаяете, поместите датчик в катушку, закрепите его, подвесьте катушку и подайте ток. Поднеся магнит, вы почувствуете, что он притягивается или отталкивается, в зависимости от полюса, и пытается зависнуть в воздухе, но неудачно.
Шаг 4: Настройка

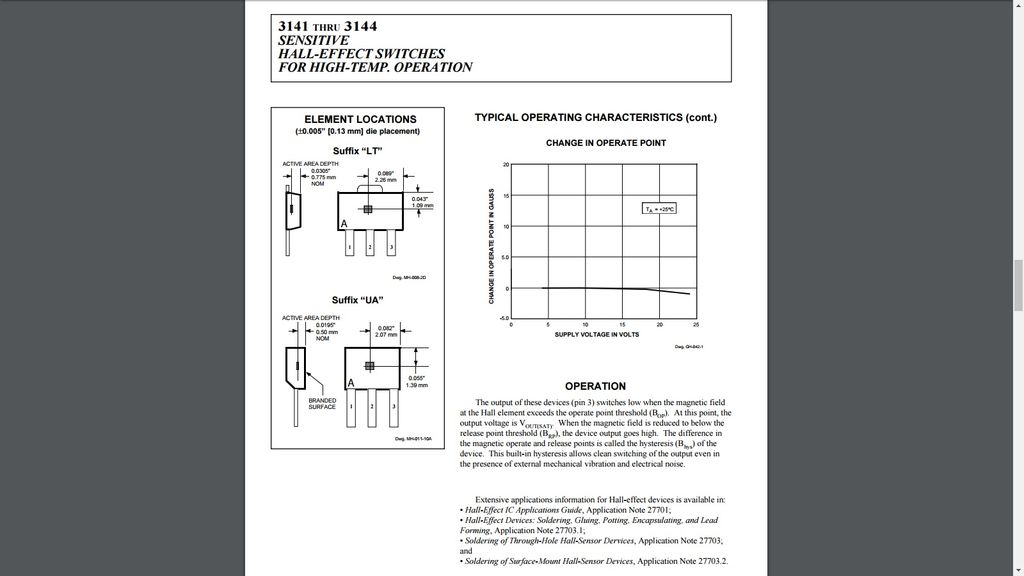

После 30 минут, потраченных над разгадкой вопроса, «почему эта штука не работает?», я пришел в отчаяние и прибегнул к крайним мерам — начал читать спецификацию к датчику, которую создают для таких людей как я. В спецификации имелись картинки, на которых было изображено, какая из сторон чувствительная.
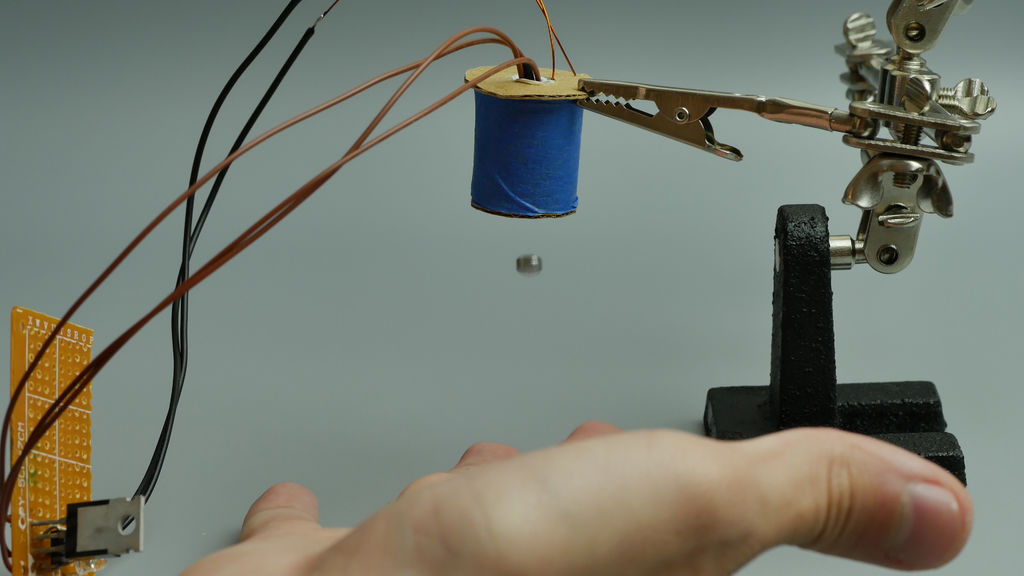
Вытащив датчик и согнув его таким образом, чтобы плоская сторона с надписями была параллельна земле, я вернул его на место — самодельное устройство стало работать заметно лучше, но магнит всё ещё не левитировал. Понять в чём проблема удалось достаточно быстро: магнит в форме таблетки — не самый лучший экземпляр для левитации. Было достаточно сместить центр тяжести к нижней части магнита (я сделал это при помощи куска толстой бумаги ). Кстати, не забудьте проверить, какая сторона магнита притягивается к катушке. Теперь всё работало более или менее нормально и осталось закрепить и защитить датчик.
Какие еще нюансы есть в этом проекте? Сначала я хотел использовать адаптер на 12V, но электромагнит быстро грелся, и мне пришлось переключить его на 5V, я не заметил никаких ухудшений в работе, а нагрев был практически устранён. Диод и ограничивающий резистор были практически сразу отключены. Также я снял с катушки синюю бумагу — мотки медной проволоки смотрятся гораздо красивее.
Как сделать левитрон — магнитная левитация своими руками в виде левитатора на подставке
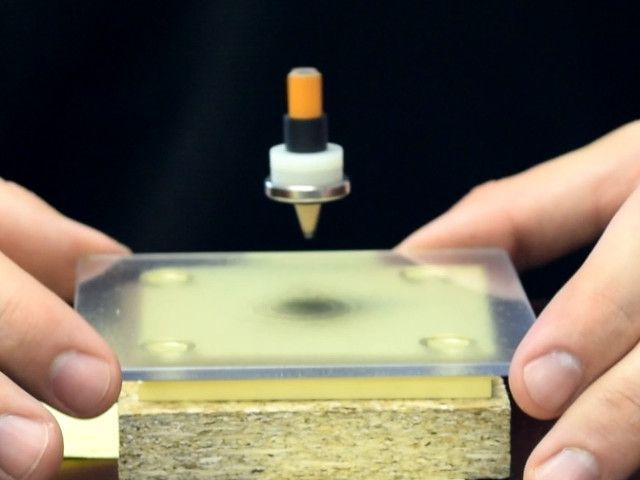
Помните популярную игрушку из 90-х «Левитрон»? Это волчок, который висит в воздухе за счет магнитных сил. Попробуем сделать сами такую игрушку из подручных материалов и понаблюдаем за магнитной левитацией.
Нам потребуются следующие материалы:
Шаг 1: Раскладка
В игрушке «Левитрон», которая была популярна в 90-х годах, и которая больше не продается (или продается?), использовались два специальных керамических кольцевых магнита. Мы же с вами сделаем игрушку, используя несколько стандартных неодимовых магнитов.
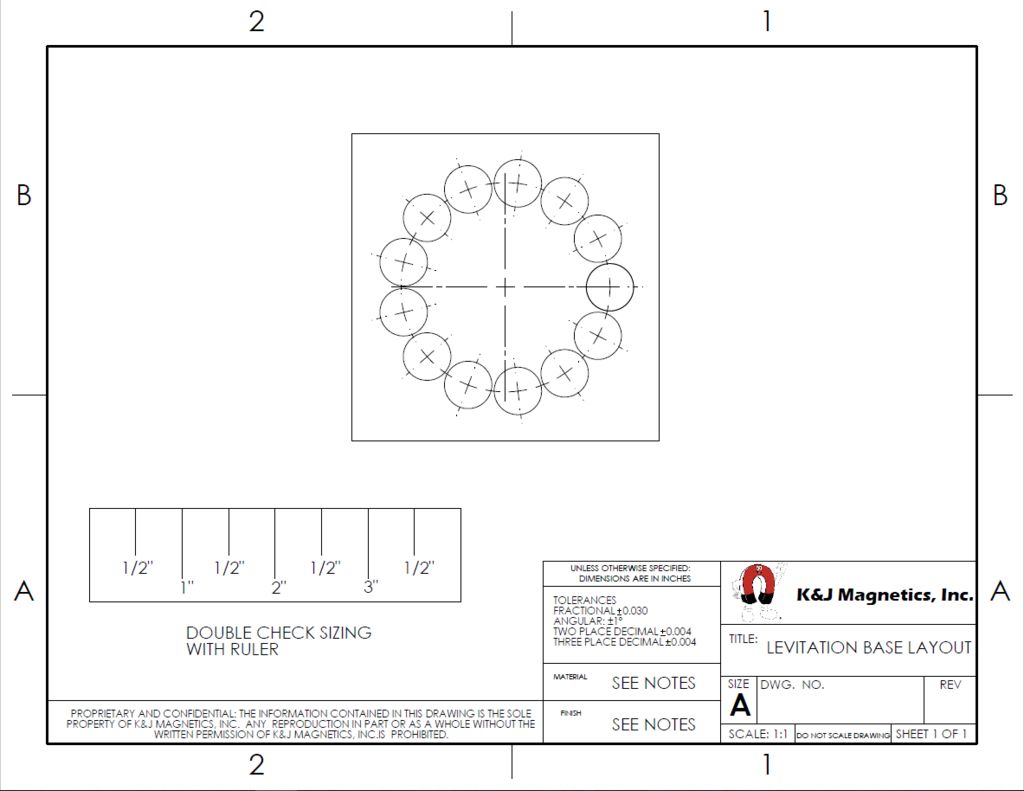
Как сделать левитрон с подставкой своими руками? В первую очередь, распечатайте на принтере макет, изображенный выше. Он нужен для разметки отверстий под установку магнитов. Обязательно проверьте размеры с помощью линейки. Затем вырежьте макет по квадратной разметке.
Шаг 2: Вырезаем деревянное основание

Вырежьте деревянную заготовку такого же размера, как и бумажный макет. Вы можете использовать для изготовления основания любой пиломатериал, но его толщина должна быть не менее 6 мм.
Шаг 3: Переносим макет на основание

Далее приклейте бумажный макет к деревянному блоку. С помощью сверла Форстнера диаметром 12 мм накерните центр в каждом круге. Это необходимо для последующего точного сверления отверстий.
Шаг 4: Сверлим отверстия

Пришло время сверлить отверстия. Чтобы получились качественные отверстия с плоским дном, для сверления используйте сверло Форстнера диаметром 12 мм. Установите на сверлильном станке глубину сверления так, чтобы дно отверстия находилось чуть ниже верхней поверхности блока. Нужно, чтобы магниты располагались как можно ближе к поверхности.
Во время сверления макет должен оставаться наклеенным на деревянный блок, чтобы сверление было более точным.
Шаг 5: Устанавливаем магниты


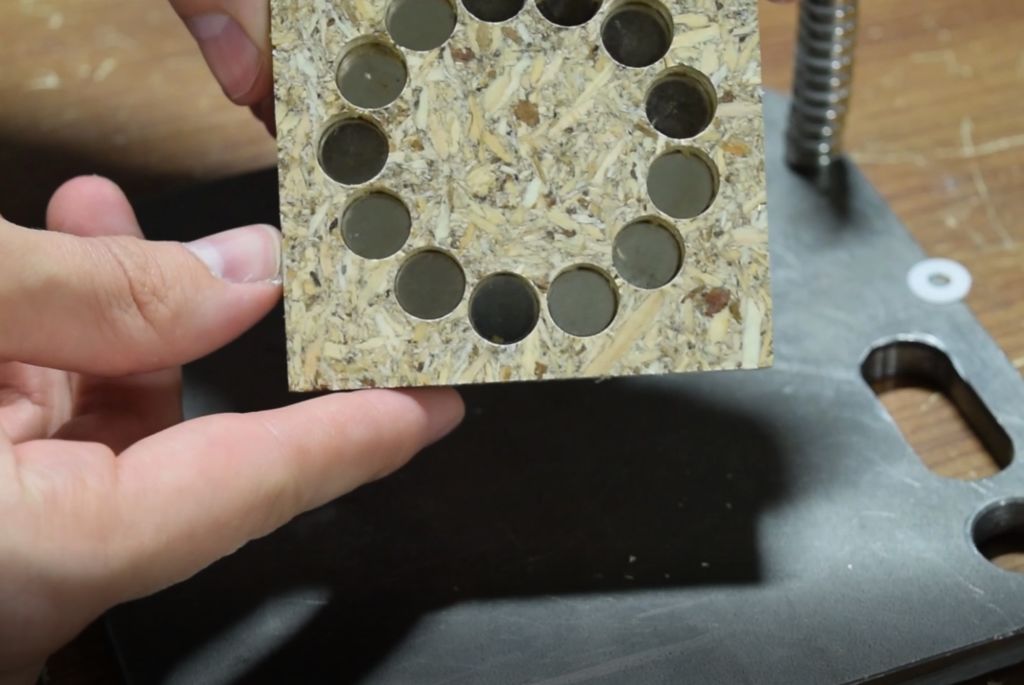
Отверстия просверлены. Пора вставлять магниты. Они должны быть обращены одним из полюсов вверх. Установим их северным полюсом вниз. Чтобы определить, где северная, а где южная стороны, используйте маркированный магнит D68PC-RB или другой способ.
Возьмите стопку марки N52 и вставьте по одному в каждое отверстие. Используйте что-нибудь для проталкивания их вглубь отверстий. Можете воспользоваться деревянным дюбелем.
Во время установки, поместите блок на стальную пластину, чтобы магниты удерживались на дне отверстий.
Убедитесь, что магниты располагаются как можно глубже в отверстиях Левитатора.
Шаг 6: Делаем волчок

Далее делаем волчок. Отрежьте карандаш длиной примерно 40 мм. У него должен быть заострен конец. Намотайте на карандаш изоленту, чтобы увеличить диаметр для установки внутрь кольцевого магнита.
Разместите кольцевой магнит на карандаше так, чтобы северный полюс был обращен вниз (в сторону острого конца карандаша). Для увеличения веса волчка, наденьте на него несколько пластмассовых шайб.
В последствии вам придется экспериментировать с весом и высотой центра тяжести волчка, чтобы он работал так, как надо. Для этого может потребоваться очень много времени.
Шаг 7: Тестируем
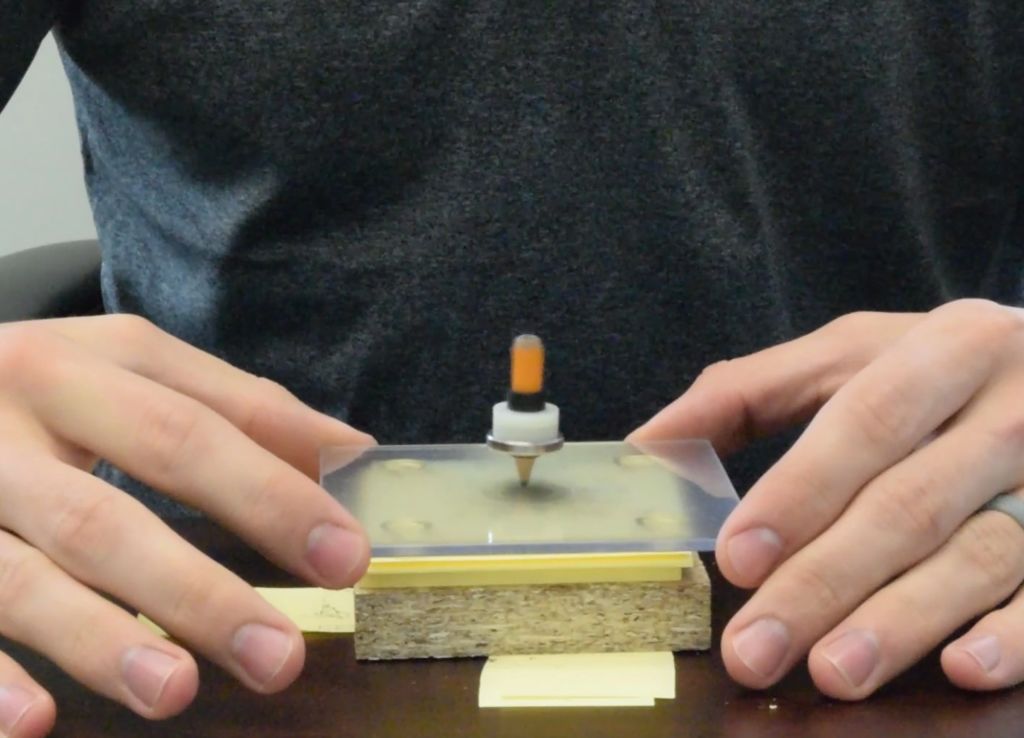
Отрежьте кусок пластика или картона, чтобы сделать платформу. Платформа укладывается поверх основания с магнитами. Волчок раскручивается на этой платформе, затем платформа с волчком поднимается, чтобы волчок попал в «магнитную яму».
Если вы сможете заставить волчок висеть, то вам крупно повезло. Чтобы волчок работал как следует, вам, возможно, придется потратить на это уйму времени.
Вот несколько советов, как можно отрегулировать работу устройства. Во-первых, нужно сбалансировать основание. Используйте картонные открытки или листки бумаги для заметок, чтобы поднять стороны основания и выровнять его.
Если волчок продолжает отклоняться в одну сторону, вам нужно будет поднять эту сторону. Здесь лучше использовать трехточечную систему нивелирования.
Вес волчка также является ключевым фактором. В устройстве есть некая «яма», то есть зона, магнитное поле в центре которой немного слабее, чем у краев. Чтобы волчок оставался в этой яме, вам нужно либо добавить ему вес, либо снизить его.
Если волчок сразу вылетает, то вам, вероятно, нужно добавить ему веса. Если волчок не отрывается от платформы, возможно, он слишком тяжелый.
Также нужно убедиться, что высота платформы выбрана правильно. Если волчок плохо вращается, попробуйте подложить бумажки или картонки под платформу.
Посмотрите видео, чтобы узнать, как это работает!
Шаг 8: Печать на 3D-принтере
Если у вас есть 3D-принтер, то распечатайте игрушку на нем. Вот ссылка на файлы в ThingiVerse.
Если желаете, можете прочитать статью о том, как работает левитирующий волчок.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Как сделать левитрон на электромагните
Автор: crocodil, crocodil@mail.ua
Опубликовано 15.01.2014
Создано при помощи КотоРед.

Левитация – одно из воплощений человеческой мечты о полете.

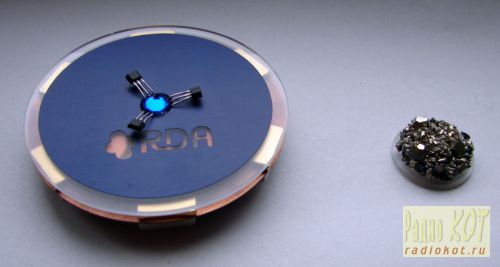
Созерцание парящего кристалла – хороший способ релаксации и пополнения пси-энергии.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен природными кристаллами пирита и халькопирита и имеет сходство с цельным кристаллом.
Согласно теореме Ирншоу, являющейся следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Однако существует возможность сделать левитацию реальной, например, используя электронную стабилизацию – электромагниты, управляемые посредством электроники.
Поскольку действительную природу магнетизма и гравитации никто пока не объяснил, то работу левитатора можно описать так:
Суммарная картина магнитных силовых линий неодимовых магнитов, расположенных в основании левитатора представляет собой поле магнитного кольца с прямоугольным поперечным сечением. Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
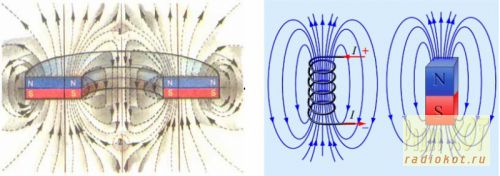
Картина силовых линий магнитного поля кольца, электромагнита и магнита.
При конструировании левитатора я ознакомился с патентом US20070170798: https://www.freepatentsonline.com/20070170798.pdf Вот некоторые рисунки с этого патента:
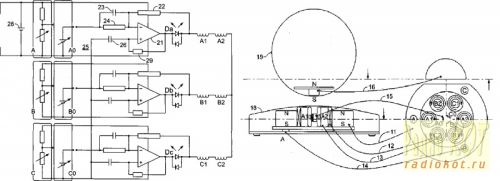
Контроль левитирующего магнита осуществляется с помощью оптических датчиков положения и 3-х пар электромагнитов. Смещение магнита влево компенсируется за счет сочетания действия южного полюса электромагнита A1 и северного полюса электромагнита A2. Конденсатор 23 помогает противостоять любым быстрым смещениям магнита.
Также была использована идея Nicanor Apostol: https://www.youtube.com/user/nick500453/videos для контроля положения левитирующего магнита с помощью датчиков магнитного поля – датчиков Холла.
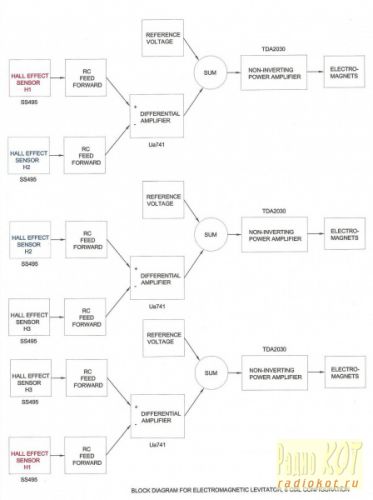
Операционные усилители включены в дифференциальном режиме. Каждый датчик Холла выдает сигнал на два ОУ, на прямой вход одного и инвертирующий другого.
После некоторых раздумий и экспериментов получилась такая схема:
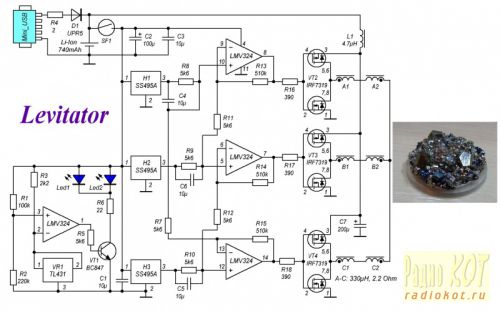
При появлении кристалла в зоне левитации, геркон замыкается и на схему подается питание, она начинает генерировать, возникает самовозбуждение системы – кристалл парит.
Устойчивая левитации кристалла достигается небольшим подгибанием датчиков Холла в вертикальной плоскости. При этом можно ориентироваться на потребление тока левитатором. При точной настройке оно будет менее 100mA, и при попытке сместить левитирующий кристалл по горизонтали в какую-либо сторону будут ощущаться одинаковые усилия. Также при точной настройке практически пропадает шум, связанный с работой электромагнитов. На первом ОУ и TL431 собран супервизор питания. Если при левитации кристалла пропадает синяя подсветка, значит, напряжение батареи менее 3.6V и её следует зарядить.
Кстати, в моем случае наблюдается интересное явление раскручивания кристалла против часовой стрелки. Если его слегка закрутить, то дальше он раскручивается сам – примерно до 50-140 оборотов в минуту, в зависимости от напряжения питания и высоты левитации. Связано это с неоднородностью намагниченности кристалла и с тем, что включенные по схеме звезда электромагниты левитатора в какой-то момент начинают работать подобно трехфазному двигателю.
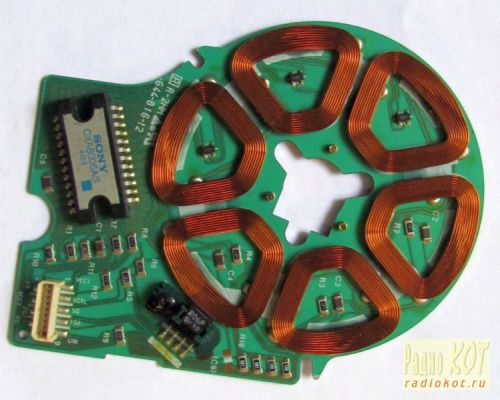
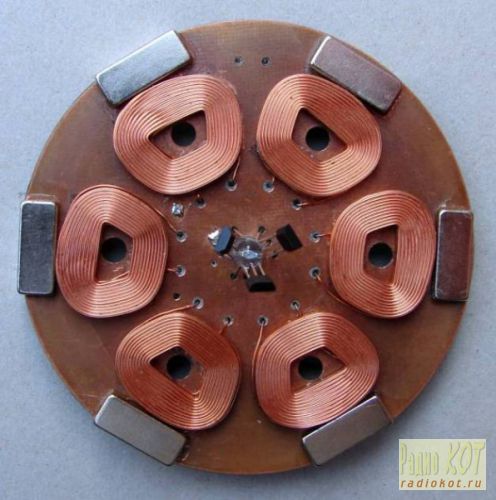
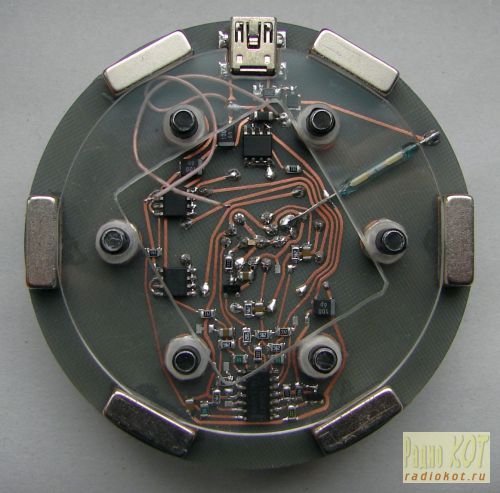
Катушки электромагнитов использованы с двигателя ведущего вала видеомагнитофона (типа как на фото ниже). Индуктивность каждой 330mkH, сопротивление 2.2 Ohm. Направление намотки этих катушек видно на фото – это важно для правильной работы левитатора. В конструкции использовано шесть неодимовых магнитов 15*5*5мм, шесть 15*6*2мм и один диаметром 20мм, толщиной 5мм в кристалле. ОУ LMV324 можно заменить аналогичным по параметрам «rail to rail op amp». Вместо IRF7319 подойдёт IRF7389. В качестве ферромагнитного сердечника катушек электромагнитов использованы болты и гайки М4, они же и скрепляют всю конструкцию.

1. Если придать магниту в точке 1 быстрое вращение вокруг вертикальной оси (сделать из него волчок), то он там и будет оставаться. Сам по себе волчок стремится сразу перекувыркнуться и упасть. Раскрученный же волчок этого сделать не может – ему приходится противодействовать моменту инерции. Минус такого решения – ограниченное несколькими минутами время левитации.

2. Известно, что диамагнетики выталкиваются магнитным полем. Если взять кусок пиролитического графита (диамагнетика) – наш магнитик с удовольствием будет над ним левитировать. Минус – небольшая высота левитации, как следствие отсутствия в природе сильных диамагнетиков. Или сильных магнитов в маленьком объеме.

3. Вариант предыдущего случая – использовать «идеальный» диамагнетик, каковым есть по сути сверхпроводник. Например, высокотемпературный сверхпроводник с Пандоры – анобтаниум. Имеем приличную высоту парения сверхпроводника над магнитной подставкой. Минус решения – дороговизна. Нерафинированный анобтаниум стоит около двадцати миллионов долларов за килограмм, очищенный повышает стоимость вдвое – до сорока миллионов.
 Этот серый камушек идет по 20 миллионов за кило.
Этот серый камушек идет по 20 миллионов за кило.
Предвидя вопросы, отвечу на некоторые из них:
1. Парящий кристалл есть нельзя, он не вкусный и не съедобный.
2. Если ты думаешь, что как магнитный железняк может притягивать железо, ты так же можешь заставить его притянуть куски керамики, то ты заблуждаешься,… магнитный железняк может притягивать железо, но не взаимодействует с медью. Таково движение Дао (из китайского философского трактата Хуайнань-цзы).
3. Именно анобтаниум вызвал появление на Пандоре таких изумительных геологических достопримечательностей, как каменные арки и парящие горы.

Разводку платы прилагаю. 🙂
Отличие – низ левитатора подсвечивается 2-мя светодиодами, которые вынесены ближе к краям платы. Должно смотреться эффектнее, ярче.
Подсветку внизу можно сделать другим цветом, при разряде батареи будет пропадать только нижняя подсветка.
Создаем эффект левитации с помощью Ардуино
На идею этого урока натолкнул проект краудфандинговой платформы Kickstarter под названием «Air Bonsai», действительно красивый и загадочный, который сделали японцы.

Но любая загадка может быть объяснена, если посмотреть внутрь. Фактически это магнитная левитация, когда есть объект, левитирующий сверху, и электромагнит, контролируемый схемой. Давайте попробуем вместе реализовать этот загадочный проект.
Шаг 1: Как это работает

Мы выяснили, что схема устройства на Кикстартере была довольно сложной, без какого-либо микроконтроллера. Не было возможности найти её аналоговую схему. На самом деле, если посмотреть более внимательно, принцип левитации довольно прост. Нужно сделать магнитную деталь, «плавающую» над другой магнитной деталью. Основная дальнейшая работа заключалась в том, чтобы левитирующий магнит не падал.
Было также предположение, что сделать это с Arduino на самом деле намного проще, чем пытаться понять схему японского устройства. На самом деле всё оказалось намного проще.
Магнитная левитация состоит из двух частей: базовой части и плавающей (левитирующей) части.
Основание
Эта часть находится внизу, которая состоит из магнита для создания круглого магнитного поля и электромагнитов для управления этим магнитным полем.
Каждый магнит имеет два полюса: север и юг. Эксперименты показывают, что противоположности притягиваются и одинаковые полюса отталкиваются. Четыре цилиндрических магнита помещаются в квадрат и имеют одинаковую полярность, образуя круглое магнитное поле вверх, чтобы вытолкнуть любой магнит, который имеет один и тот же полюс между ними.
Плавающая деталь
Деталь включает в себя магнит, плавающий над основанием, который может нести небольшой горшок с растением или другие предметы.
Магнит сверху поднимается магнитным полем нижних магнитов, потому что они с одинаковыми полюсами. Однако, как правило, он склоняется к падению и притягиванию друг к другу. Чтобы предотвратить переворот и падение верхней части магнита, электромагниты создадут магнитные поля, чтобы толкать или тянуть, дабы сбалансировать плавающую часть, благодаря датчику Холла. Электромагниты управляются двумя осями X и Y, в результате чего верхний магнит поддерживается сбалансированным и плавающим.
Контролировать электромагниты нелегко, требуется ПИД-регулятор, который подробно обсуждается на следующем шаге.
Шаг 2: ПИД-регулятор (PID)

Из Википедии: «Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.»
В простом понимании: «ПИД-регулятор вычисляет значение «ошибки» как разность между измеренным [Входом] и желаемой установкой. Контроллер пытается свести к минимуму ошибку, отрегулировав [выход]».
Итак, вы указываете PID, что измерить (Вход), какое значение вы хотите и переменную, которая поможет иметь это значение на выходе. Далее ПИД-регулятор настраивает выходной сигнал, чтобы сделать вход равным установке.
Стоит поблагодарить сообщество любителей Arduino, которое написало PID-библиотеку и которая очень проста в использовании. Дополнительная информация об Arduino PID есть на официальном сайте Arduino. Нам нужно использовать пару ПИД-регуляторов под Arduino, один для оси X и другой для оси Y.
Шаг 3: Комплектующие

Список комплектующих для урока получается приличным. Ниже приведен список компонентов, которые вы должны купить для этого проекта, убедитесь, что у вас есть все перед запуском. Некоторые из компонентов очень популярны, и, вероятно, вы найдете их на своем собственном складе или дома.
Шаг 4: Инструменты
Вот список инструментов, наиболее часто используемых:
Шаг 5: LM324 Op-amp, L298N драйвер и SS495a

LM324 Op-amp
Операционные усилители (op-amp) являются одними из наиболее важных, широко используемых и универсальных схем, используемых сегодня.
Обычным операционным усилителем, который мы выбрали, является LM324, это дешево, и вы можете купить его в любом магазине электроники. LM324 имеет 4 внутренних усилителя, которые позволяют гибко его использовать, однако в этом проекте нужны только два усилителя: один для оси X, а другой для оси Y.
Модуль L298N
Двойной H-мост L298N обычно используется для управления скоростью и направлением двух двигателей постоянного тока или с легкостью управляет одним биполярным шаговым двигателем. L298N может использоваться с двигателями с напряжением от 5 до 35 В постоянного тока.
Существует также встроенный регулятор 5V, поэтому, если напряжение питания до 12 В, вы также можете подключить источник питания 5 В от платы.
В этом проекте использован L298N для управления двумя парами катушек электромагнита и использован выход 5 В для питания Arduino и датчика холла.
Подключение к Arduino: нам нужно удалить 2 перемычки в контактах EnA и EnB, затем подключить 6 контактов In1, In2, In3, In4, EnA, EnB к Arduino.
SS495a Датчик Холла
Аналоговый датчик приведет к диапазону напряжений от 250 до Vcc, который вы можете прочитать с помощью аналогового входа Arduino. Для измерения магнитного поля в обеих осях X и Y требуются два датчика холла.
Шаг 6: Неодимовые магниты NdFeB (неодим-железо-бор)

Из Википедии: «Неодим — химический элемент, редкоземельный металл серебристо-белого цвета с золотистым оттенком. Относится к группе лантаноидов. Легко окисляется на воздухе. Открыт в 1885 году австрийским химиком Карлом Ауэром фон Вельсбахом. Используется как компонент сплавов с алюминием и магнием для самолёто- и ракетостроения.»
Шаг 7: Готовим основание

Использовали небольшой терракотовый горшок, который обычно используется для выращивания суккулента или кактуса. Вы также можете использовать керамический горшок или деревянный горшок, если они подходят. Используйте сверло диаметром 8 мм, чтобы создать отверстие в нижней части горшка, которое используется для удерживания гнезда постоянного тока.
Шаг 8: 3D-печать плавающей части

Шаг 9: Подготовка SS495a модуля датчика Холла


Шаг 10: Цепь Op-amp





Припаяйте гнездо и резисторы к печатной плате, следуя схеме, обратив внимание на то, чтобы поместить два потенциометра в одном направлении для более легкой калибровки позже. Присоедините LM324 к гнезду, затем подключите два выхода модуля датчиков холла к цепи op-amp.
Два выходных провода LM324 подключите к Arduino. Вход 12 В с входом 12 В модуля L298N, выход 5 В модуля L298N к 5V потенциометра.
Шаг 11: Сборка электромагнитов




Соберите электромагниты на акриловый лист, они закреплены в четырех отверстиях вблизи центра. Затяните винты, чтобы избежать движения. Поскольку электромагниты симметричны по центру, они всегда находятся на полюсах напротив, так что провода на внутренней стороне электромагнитов соединены вместе, а провода на внешней стороне электромагнитов подключены к L298N.
Протяните провода под акриловым листом через соседние отверстия, чтобы подключиться к L298N. Медный провод покрыт изолированным слоем, поэтому вы должны удалить его ножом, прежде чем вы сможете припаять их вместе.
Шаг 12: Сенсорный модуль и магниты




Используйте горячий клей для фиксации модуля датчика между электромагнитами, обратите внимание, что каждый датчик должен быть квадратным с двумя электромагнитами, один на передней и другой на задней панели. Попробуйте выполнить калибровку двух датчиков как можно более централизованно, чтобы они не перекрывались, что сделает датчик наиболее эффективным.
Шаг 13: Разъем питания постоянного тока и выход L298N 5V

Припаяйте гнездо питания постоянного тока двумя проводами и используйте термоусадочную трубку. Подключенный разъем питания постоянного тока к входу модуля L298N, его выход 5 В будет подавать питание на Arduino.
Шаг 14: L298N и Arduino

Подключите модуль L298N к Arduino, следуя приведенной выше схеме:
L298N → Ардуино
5V → VCC
GND → GND
EnA → 7
В1 → 6
В2 → 5
В3 → 4
В4 → 3
EnB → 2

Шаг 15: Arduino Pro Mini программер

Поскольку у Arduino pro mini нет USB-порта для последовательного порта, вам необходимо подключить внешний программатор. FTDI Basic будет использоваться для программирования (и питания) Pro Mini.
Шаг 16: Подготовка плавающей части

Соедините два магнита D35*5 для увеличения магнетизма.
Шаг 17: Калибровка






Загрузите программу ReadSetpoint.ino в Arduino, которую можно скачать выше. Эта программа будет считывать значения датчика Холла и отправлять их на компьютер через последовательный порт. Откройте COM-порт, чтобы увидеть его. Подключите 12 В постоянного тока к гнезду питания постоянного тока, вы также используете осциллограф для считывания значения датчика.
Шаг 18: Загрузка основной программы




После калибровки значения установки (Setpoint) самое время получить результаты. Загрузите основную программу Levitation.ino, которая приведена выше.
Используйте супер клей для фиксации магнита и держателя магнита, который ранее был напечатан на 3D-принтере. После загрузки основной программы вы можете внести небольшие корректировки на потенциометры, чтобы плавающая деталь была зафиксирована в центре.
Шаг 19: Собираем всё вместе








Сначала прикрепите гнездо питания постоянного тока к горшку, затем поместите оставшиеся части в горшок. Наконец, используйте оставшийся акриловый лист, чтобы сделать поверхность горшка.
Шаг 20: Подготовка растения




Прикрепите деревянный горшок к плавающей части магнита. Мы использовали маленький кактус для посадки. Вы можете использовать кактус или суккулент или любой мини-бонсай, который является маленьким и легким.
Шаг 21: Финальный результат


Наслаждайтесь своим результатом, благодаря вашим усилиям вы сделали отличный проект, который теперь будет радовать вас и ваших друзей.
Добавить комментарий Отменить ответ
В соответствии со ст. 1259 ГК РФ все материалы данного сайта являются объектом авторского права. Исключительные права на его использование принадлеждат владельцу данного сайта, согласно п.1 ст.1229 ГК РФ. Любое копирование материалов данного сайта без разрешения владельца сайта запрещено законом.
© АрдуиноПлюс.ру, 2017—2021 ( 49–0,145 )